
SELOK
 In the framework of the DLR project SELOK (Self Localisation on Planetary Surfaces) a prototype of a low power, low mass 2 dimensional LIDAR (Light Detection and Ranging) system has been developed. Target application is scanning of the surrounding area for the navigation and localization of autonomous rovers. The system features very fast acquisition times and a large angular coverage. Measurement speed can be traded against accuracy and vice versa by user command.
In the framework of the DLR project SELOK (Self Localisation on Planetary Surfaces) a prototype of a low power, low mass 2 dimensional LIDAR (Light Detection and Ranging) system has been developed. Target application is scanning of the surrounding area for the navigation and localization of autonomous rovers. The system features very fast acquisition times and a large angular coverage. Measurement speed can be traded against accuracy and vice versa by user command.
Instrument Description
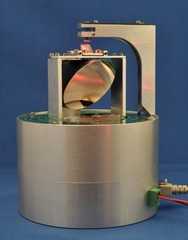
The SELOK instrument is an autonomous 2D LIDAR system with almost 360° angular coverage. It consists of the following components:
- Rotating scan head for laser beam deflection
- Receiving optics comprising of a parabolic mirror, mounted on the rotating scan head as well
- Avalanche Photo Diode (APD) receiver electronics
- Laser diode and associated driver electronics
- DSP (Digital Signal Processing) core built into FPGA (Field Programmable Gate Array)
- 10/100MBit Ethernet Interface for data transmission and control. As an alternative, a SpaceWire data link is also possible
- Wide input voltage-range DC power interface
- Fully autonomous operation and automatic online calibration due to builtin microcontroller and firmware
Specifications
| Item | Demonstrated Value |
|---|---|
| Mass | m=2.44 kg w/o cover <1kg for next generation |
| Volume | 186xØ140 mm3 |
| Angular coverage | 336° |
| Angular resolution | 0.0107° |
| Scan head speed | 0…400 rpm |
| Net sample rate | 0.6 Hz…39.06 kHz |
| Theo. max distance | 74.5 m (@f0=2 MHz) |
| Range resolution | 1/100 mm |
| Input voltage range | 8…32 V |
| Power consumption | Active: 6.96 W, Idle: 3.00 W |
| Laser | Class 3R, λ=658 nm, P0 = 25 mW |
| Modulation freq. | 2…5 MHz |
| Interface | 10/100MBit Ethernet |
Applications and Missions
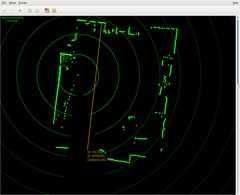
SELOK action thumbnailThe new SELOK instrument can be used in future space missions for navigation and localization of autonomous rovers, e.g. on the Moon or on Mars. It might be also used for rate distance measurements during docking or landing maneuvers with high update rates and accuracy even with non-cooperative targets.
Contact
- Dr.-Ing. Hartmut Henkel, E-Mail: henkel @ vh-s.de
This work was funded by the German Space Agency DLR under contract 50RA0912.