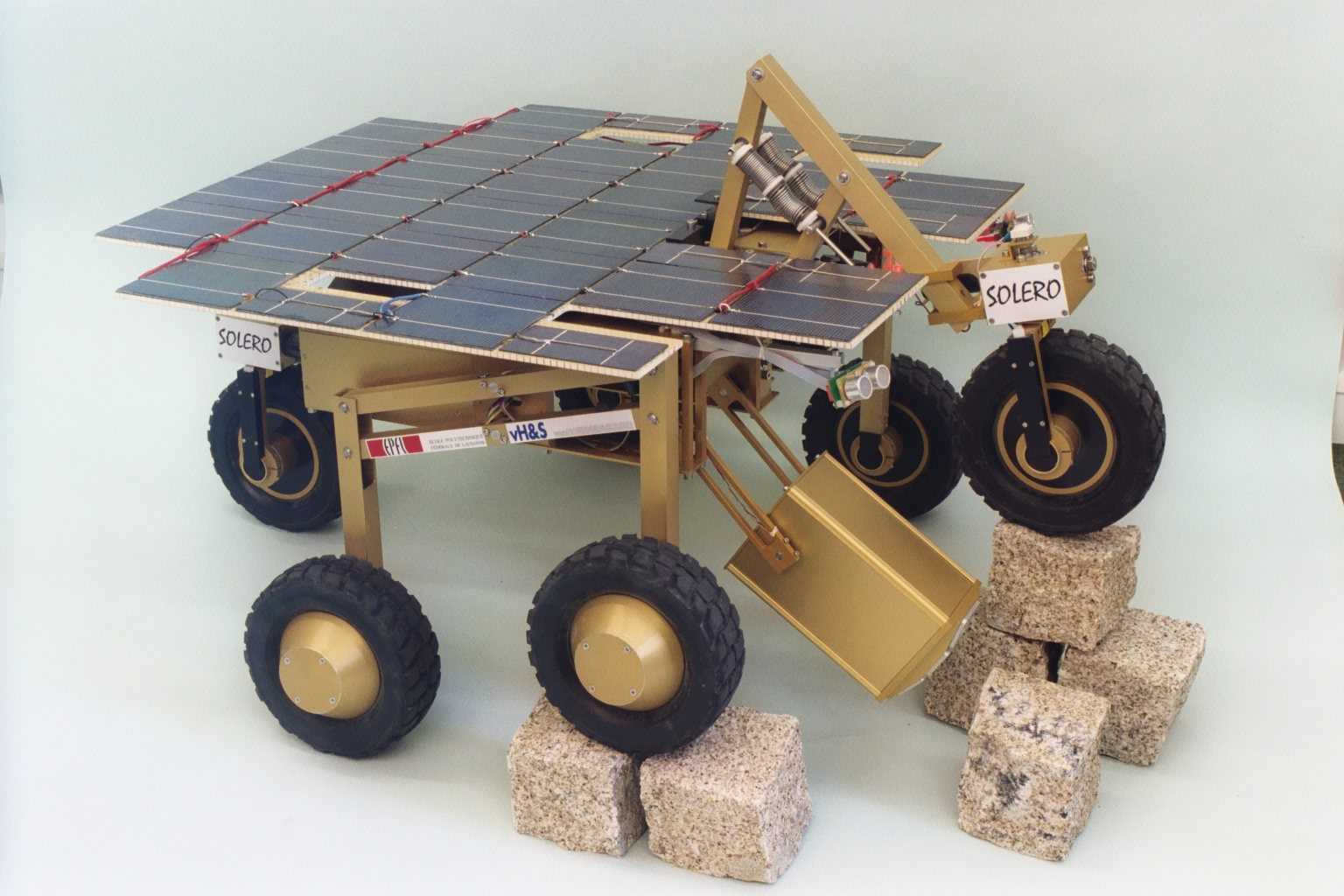
Solero
The Solero (Solar-Powered Exploration Rover) Rover is an innovative miniature rover for regional mobility on a planetary surface.
Discovering new surfaces
The system is designed for autonomous operation, navigation and obstacle avoidance within a range of about 10 km and withstands the enviromental conditions on Mars. The Rover weighs less than 10 kg and is able to overcome obstacles up to 0,2 m. Solero features an electric motor which has a power of 30W peak and accelerate the Rover up to a speed of 20 cm per second.
Solero is able to drive a distance of 200 meters a day and has a one-surface life time of more than 100 days. Its model-payload consists of APX-Spectrometers, a Mössbauer Spectrometer and a Close-Up Imager. The Rover has a passive chassis concept with unique climbing capabilities. The system has a rhombus configuration: one wheel is mounted on a fork in the front, one wheel in the rear and two wheels each side are suspended on bogies.
Project
The idea behind the Solero project was to develop a rover for the in-situ analysis of Martian geochemistry and mineralogy.  And for a model Mission, a Mission to Mars was chosen. The Solero project was carried out jointly by Ecole Polytechnique Fédérale de Lausanne, Switzerland and von Hoerner & Sulger GmbH, under contract of the European Space Agency (ESA). The Challenge was to create miniaturized payload instruments and to provide the required resources for operation (power, communications, control, thermal control).
And for a model Mission, a Mission to Mars was chosen. The Solero project was carried out jointly by Ecole Polytechnique Fédérale de Lausanne, Switzerland and von Hoerner & Sulger GmbH, under contract of the European Space Agency (ESA). The Challenge was to create miniaturized payload instruments and to provide the required resources for operation (power, communications, control, thermal control).
The reduction of power consumption for locomotion enables this rover to be small, light and operational during more then 100 Martian days. The total mass is near 10kg and its locomotion performance, in comparison with current rover designs, advances Solero to a perfect candidate for long-range missions on near-sun planets.
Publications
- SOLERO: Solar-Powered Exploration Rover, S.Michaud, A. Schneider, R.Bertrand, P.Lamon, R.Siegwart, M. Van Winnendael, A. Schiele, 7th ESA Workshop on Advanced Space Technologies for Robotics and Automation ‘ASTRA 2002’ ESTEC, Noordwijk, The Netherlands, November 19 - 21, 2002
- The SOLERO Rover for Regional Exploration of Planetary Surfaces, R. Bertrand, P. Lamon, S. Michaud, A. Schiele, R. Siegwart, European Geophysical Society, Geophysical Research Abstracts, Vol. 5, 11850, 2003