Nanokhod
The Nanokhod Rover is a Micro-Rover for scientific exploration and was developed for extreme environments.
Discovering new surfaces
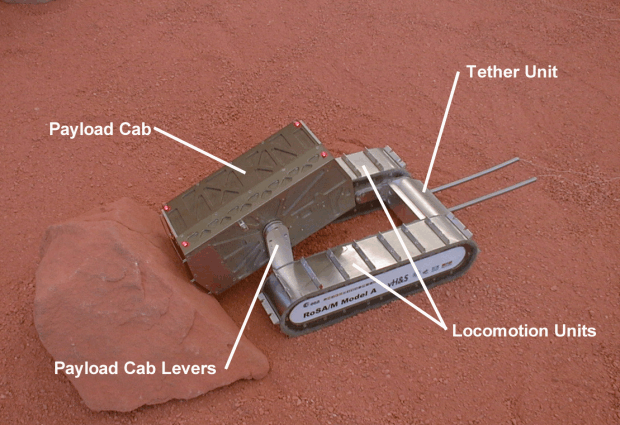
The Nanokhod Rover was built in order to explore and to analyze geochemical samples of a planetary surface. The Nanokhod “rover segment”, with a total mass of 2550g, including 1100g of payload, is a rugged, simple, reliable yet effective microrover, to carry a set of instruments in the immediate surroundings of a lander (i.e. at least 20m away from it) with a speed of 5 meters per hour. In order to maximize locomotion efficiency, it carries around only what is strictly needed for moving and deploying the instruments.

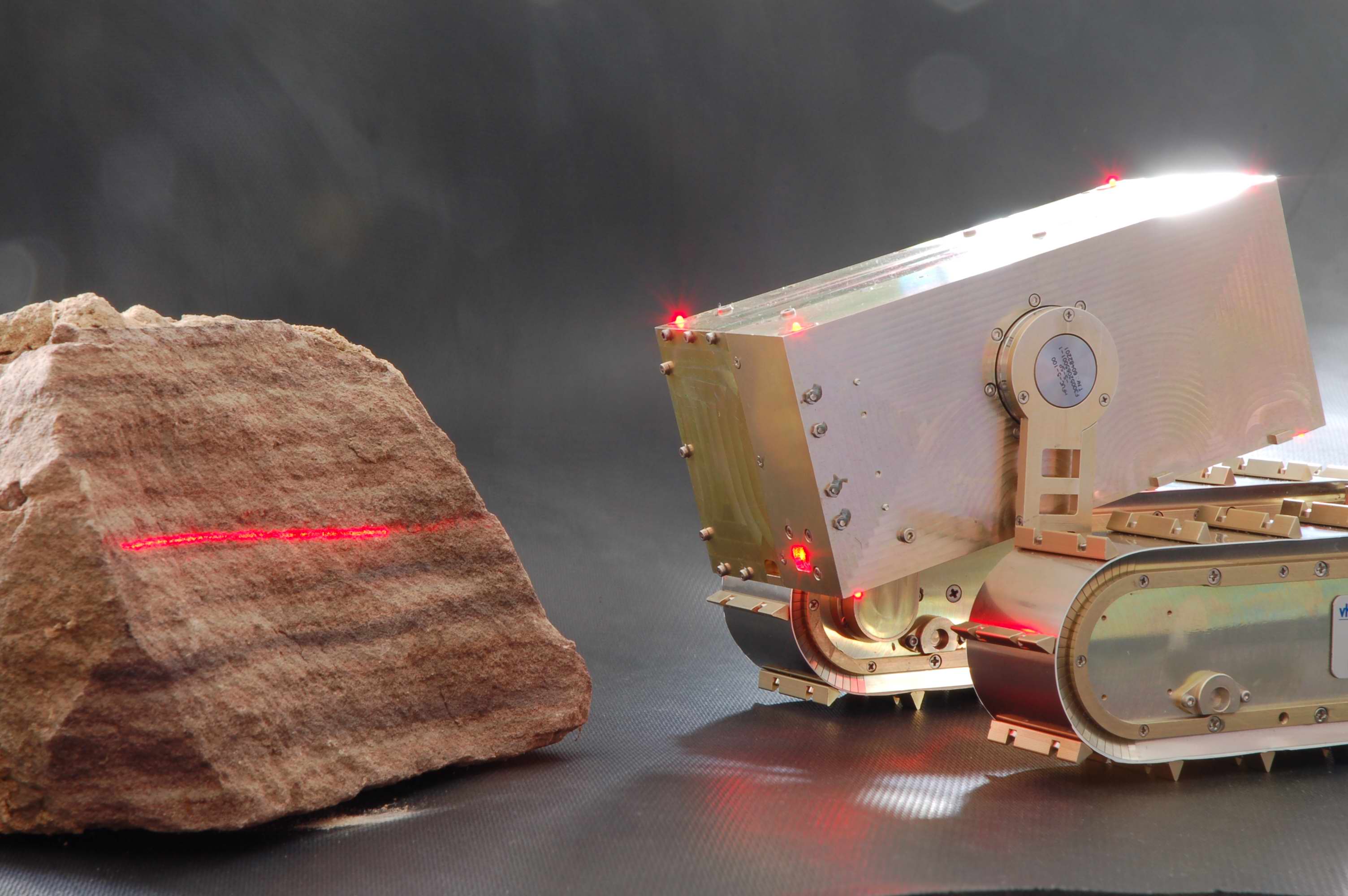
Its scientific sensor instruments a Microscopic camera, APXS and Mössbauer Spectrometers are accommodated in the central payload cab. Two rotation axes at the ends of the payload cab levers provide 2 degrees of freedom for positioning one of its two viewing windows w.r.t. a rock or soil spot of interest. Locomotion is performed by means of tracks. As a consequence of the very limited mass and volume budgets no batteries or other power supply devices are on board of the rover.
 Instead it is equipped with a thin lether consisting of two wires, providing a power and data connection to the lander. Semi-autonomous control is performed using a 3D digital elevation model of the terrain acquired by means of a panoramic camera on the lander. Thermal control is entirely passive. All micro-rover components shall withstand, under nonoperating conditions, temperatures of -140°C to +70°C.Operation will be limited to time slots during which drives and electronics are within their operating range of -80°C to +50°C.
Instead it is equipped with a thin lether consisting of two wires, providing a power and data connection to the lander. Semi-autonomous control is performed using a 3D digital elevation model of the terrain acquired by means of a panoramic camera on the lander. Thermal control is entirely passive. All micro-rover components shall withstand, under nonoperating conditions, temperatures of -140°C to +70°C.Operation will be limited to time slots during which drives and electronics are within their operating range of -80°C to +50°C.
The Nanokhod Rover Project started in the 1990’s. The first model was the MicroRoSA, developed for a mission to Mars. The latest model is the MRP, that is adapted to a mission to Mercury and thus is able to stand temperatures up to -180°C, whereas its operating period lasts 7 to 14 days.
Altogether 4 missions were calculated with Nanokhod:
- RTPE: Robotic Technology for Planetary Exploration
- Micro- RoSA: Micro-Robots for Scientific Applications
- PSPE: Payload Support for Planetary Exploration is the technology development made to achieve a high level of autonomous operations of a micro-rover placed on the Mars surface by a lander spacecraft. This rover, named Nanokhod, is characterised by an exceptionally high payload-mass/total-mass ratio. The Nanokhod weighs only about 3 kg but carries a payload of about 1.5 kg of scientific instruments. This is achieved by providing power to the rover from the lander through the tether rather than from energy sources on the rover.
- MRP: The MRP (Mercury Robotic Payload) project is the latest Nanokhod project. In this project the Rover was a part of the Bepi-Colombo Mission in order to explore the surface of the mercury. Nanokhod has been selected to provide local mobility around the landing site. After a journey of up to 4 years through the space, the Lander with its Rover should alight on the surface of a planet. The Nanokhod is perfectly designed to work on the surface of the mercury where a high vacuum is combined with temperatures in the region of -180°C. Unfortunately the Rover along with the Lander were cancelled from the Bepi-Colombo Mission but it was decided to proceed with the development to better understand and solve detailed technical problems of a real implementation in preparation of future missions.
Publications
- Klinkner, S., Lee, C.G.-Y., Wagner, C. Hlawatsch, W., Schreyer A.-M., Röser, H.-P., Destination Moon and beyond for the Microrover Nanokhod, DGLR International Symposium, Bremen, Germany, Mar. 2007
- Lee, C.G.-Y., Klinkner, S., Hlawatsch, W., Wagner, C., Schreyer A.-M., Röser, H.-P., Schaefer, J., Schiele, A., Romstedt, J. Mercury Nanokhod Rover - Hardware Realisation and Testing, ASTRA 2006, Noordwijk, Nov. 2006